Im Rahmen der Initiative MISSION KI – Nationale Initiative für Künstliche Intelligenz und Datenökonomie, wird eine modulare, verteilte Software-Architektur auf Basis von FAIR Digital Objects (FDOs) en
Innerhalb des Vorhabens MikroBeM wird auf der Ebene von biologischen Signalen, im Speziellen Elektroenzephalographie (EEG) und Elektromyographie (EMG) sowie der Herzratenvariabilität (HRV) analysiert,
Das SPACE USB-Verbundprojekt strebt die Entwicklung standardisierter multifunktioneller Schnittstellen für zukünftige orbitale Weltraummissionen an. Mit Hilfe der Schnittstellen sollen Subsysteme zu n
FAIRe hat die Entwicklung ressourcenlimitierter KI für eingebettete Systeme, cyber-physische Systeme und Edge-Geräte zum Ziel. Dabei soll der Entwicklungsansatz umfassend von der Anwendungsschicht bis
Ziel des TRIPLE-Projektlinie ist es, ein Explorationssystem zur kontaminationsfreien Durchführung wissenschaftlicher Beobachtungen in Gewässern unter Eis zu entwerfen und zu bauen und die damit verbun
Die Raumfahrt mit menschlichen Astronauten ist mit enormen Kosten und Gefahren verbunden, ohne dass sich die Investition unmittelbar auszahlt. Daher wird die Erforschung der Planeten in erster Linie m
Das hier vorgestellte Vorhaben verfolgt das Ziel, durch dedizierte Weiterentwicklung und TRL-Steigerung kritischer Komponenten die zukünftig gegebenen Möglichkeiten für Microrovermissionen auf dem Mon
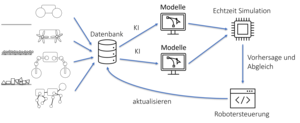
Das Vorhaben hat zum Ziel, die Komplexität von Beispielen und Modellen für Roboterlernalgorithmen zu verringern. Dafür werden bekannte physikalische Gleichungen mit maschinellen Lernmodellen verbunden
Bei NoStrandAMust handelt es sich um ein Vorhaben mit dem Ziel, die Bodeninteraktion von unterschiedlichen Robotern experimentell zu untersuchen und mittels KI-Methoden Modelle fur die Interaktion zu
Das Leuchtturmprojekt „Collaborative Processes and Services for Aeronautics and Space“ (COOPERANTS) ist ein durch das Bundesministerium für Wirtschaft und Klimaschutz (BMWK) gefördertes Projekt. Es wu