
Vorbereitende Video-Vorlesungen
Im Vorfeld des Workshops erhalten die Teilnehmenden Zugang zu sechs Video-Vorträgen, die die folgenden Kernthemen behandeln: ROS2-Grundlagen, Sensoren, Odometrie, Kartierung, Lokalisierung und Wegplanung. Diese Materialien vermitteln eine solide theoretische Grundlage und bereiten die Teilnehmenden gut auf die praktischen Übungen vor.
Praktischer Workshop
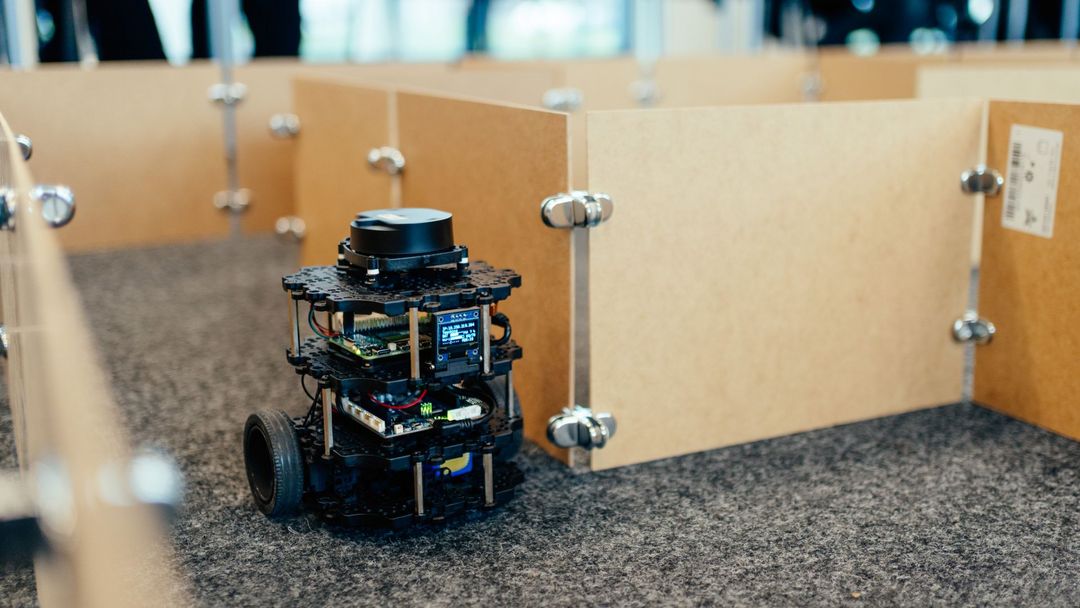
Während der zweitägigen Präsenzschulung arbeiten die Teilnehmenden in kleinen Gruppen mit TurtleBot3-Robotern. Unter detaillierter Anleitung lernen sie Folgendes:
- Einrichten von ROS2 Jazzy unter Ubuntu 24.04
- Fernsteuerung des Roboters und Verarbeitung von Sensordaten
- Erstellen und Verwenden benutzerdefinierter ROS2-Knoten in Python
- Durchführen von Kartierung und Lokalisierung in einer Labyrinth Umgebung
- Implementieren einer autonomen Navigation, die es dem Roboter ermöglicht, sich mithilfe von Wegplanungsalgorithmen von einer Startposition zu einem definierten Ziel zu bewegen
Lernziele
Am Ende des Workshops haben die Teilnehmenden praktische Erfahrungen mit der Einrichtung und Programmierung autonomer mobiler Roboter, der Integration von Sensordaten und dem Einsatz von Navigationsalgorithmen in realen Szenarien gesammelt.
Datum: 12. – 13. Februar 2026
Anmeldeschluss: 20. Januar 2026
Ort: DFKI, Robert-Hooke-Straße 1, 28359 Bremen
Schulungssprache: Englisch
Gebühr: 450 €
Zur Anmeldung senden Sie bitte eine E-Mail an: event-hb@dfki.de.
Bitte beachten Sie: Der Workshop findet ab einer Teilnehmendenzahl von sechs Personen statt. Die Teilnehmendenzahl ist begrenzt.