
Autonome Robotik für die Raumfahrt
Die Erforschung von Mond, Mars und anderen Himmelskörpern sowie des erdnahen Orbits zählt zu den größten wissenschaftlichen Herausforderungen unserer Zeit. Roboter spielen dabei eine Schlüsselrolle: Sie trotzen extremen Umweltbedingungen, erschließen bislang unzugängliche Regionen und übernehmen Aufgaben, die für den Menschen zu gefährlich oder nur schwer ausführbar sind. Mit wachsender Entfernung zur Erde steigen jedoch die Anforderungen an ihre Autonomie, da Kommunikationsverzögerungen eine direkte Steuerung zunehmend erschweren.
 © DFKI, Florian Cordes
© DFKI, Florian CordesMobile Roboter für den Einsatz auf fremden Planeten und im Orbit
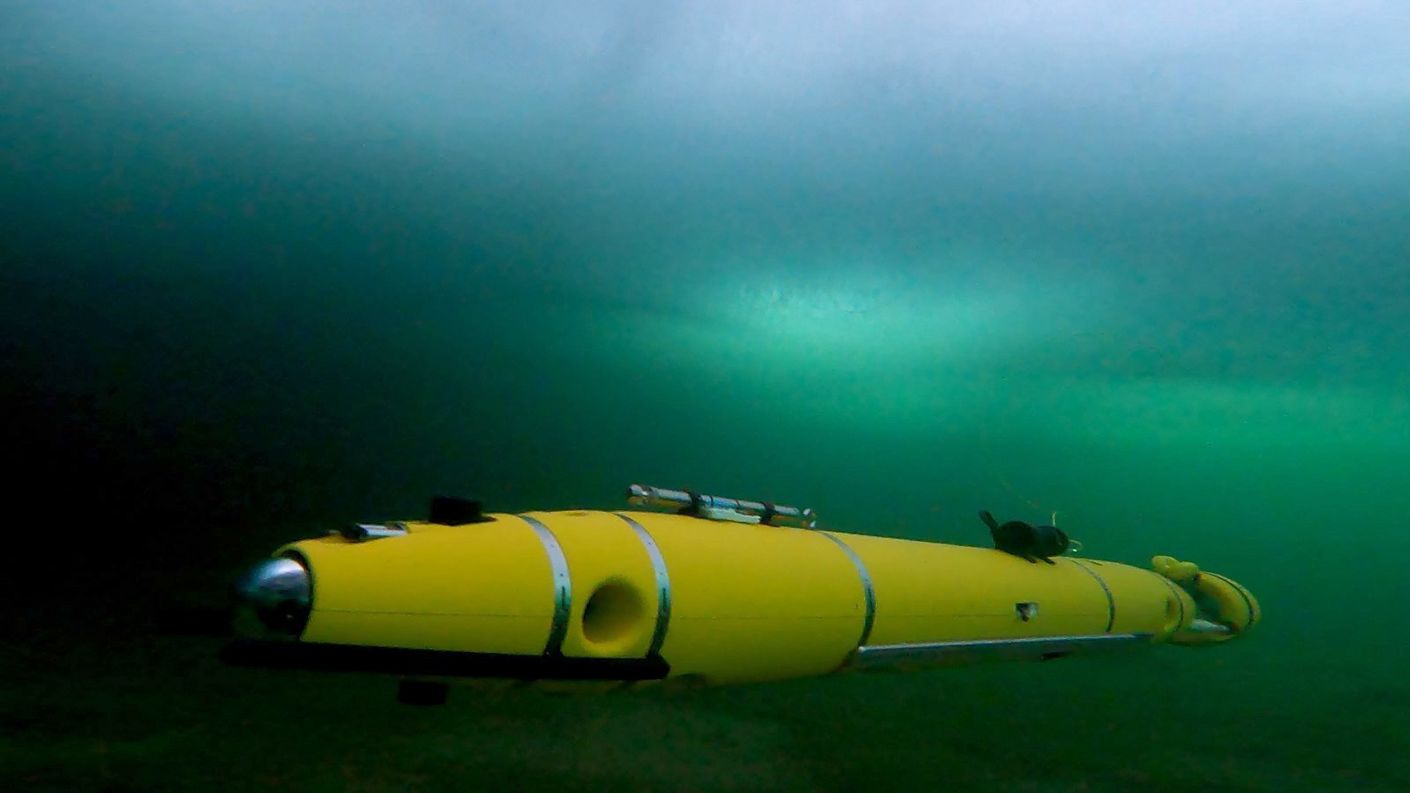
Seit über zwei Jahrzehnten entwickelt das DFKI Robotics Innovation Center in Bremen mobile Systeme, die fremde Planeten selbstständig erkunden und komplexe Aufgaben ausführen können – von der Identifikation wissenschaftlich relevanter Orte über die Probenentnahme und Analyse bis hin zur Errichtung von extraterrestrischen Infrastrukturen. Diese Systeme agieren allein oder im Team mit anderen Robotern und Menschen und bilden die Grundlage für sogenannte In-Situ Resource Utilization, also die Nutzung lokaler Ressourcen für zukünftige Missionen. Neben landgestützten Rovern erforscht das Bremer Team auch autonome Unterwasserfahrzeuge, die in flüssigen Habitaten navigieren können – etwa unter den kilometerdicken Eisschichten des Jupitermondes Europa.
 © DFKI
© DFKI
„Autonome Robotik eröffnet uns die Möglichkeit, Welten zu erkunden, die für Menschen allein nur schwer oder mit hohen Risiken erreichbar wären. Entscheidend ist dabei nicht nur die Zuverlässigkeit einzelner Systeme, sondern auch ihre Fähigkeit, im Team zu agieren und mit Menschen zusammenzuarbeiten. Die Systeme sind so konzipiert, dass sie sich flexibel an unterschiedliche Missionsbedingungen anpassen und ihre Leistungsfähigkeit über lange Zeiträume erhalten – Eigenschaften, die den Erfolg zukünftiger Weltraummissionen maßgeblich sichern.“
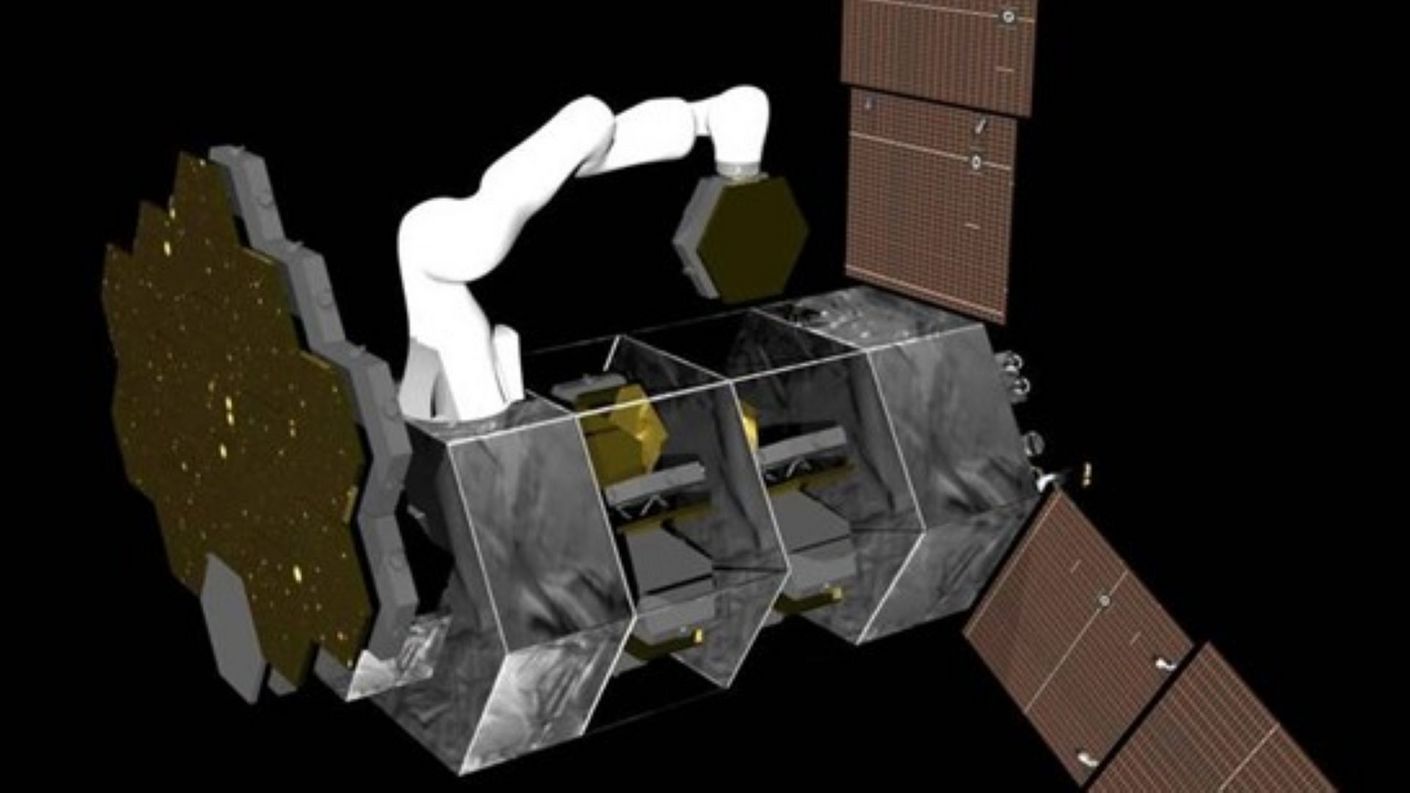
Auch im erdnahen Orbit gewinnt autonome Robotik zunehmend an Bedeutung. Satelliten, Raumstationen und andere Plattformen müssen regelmäßig inspiziert, gewartet und repariert werden – eine Aufgabe, die angesichts der stetig wachsenden Zahl aktiver Satelliten und der zunehmenden Mengen an Weltraummüll immer anspruchsvoller wird. Für diese Herausforderungen entwickelt der Forschungsbereich modulare und rekonfigurierbare Robotersysteme, die flexibel einsetzbar sind. Im Mittelpunkt stehen dabei robotische Manipulatoren, also ferngesteuerte oder autonome Roboterarme, die Aufgaben im Bereich „In-Orbit Assembly and Manufacturing“ (ISAM) übernehmen, etwa die Montage großer orbitaler Strukturen oder Wartungs- und Instandsetzungsarbeiten an Satelliten und Raumstationen. Auch die aktive Beseitigung von Weltraumschrott, das sogenannte Active Space Debris Removal, zählt zu den Forschungsfeldern.
 © DFKI, Meltem Fischer
© DFKI, Meltem FischerVielseitige und modulare Roboterplattformen
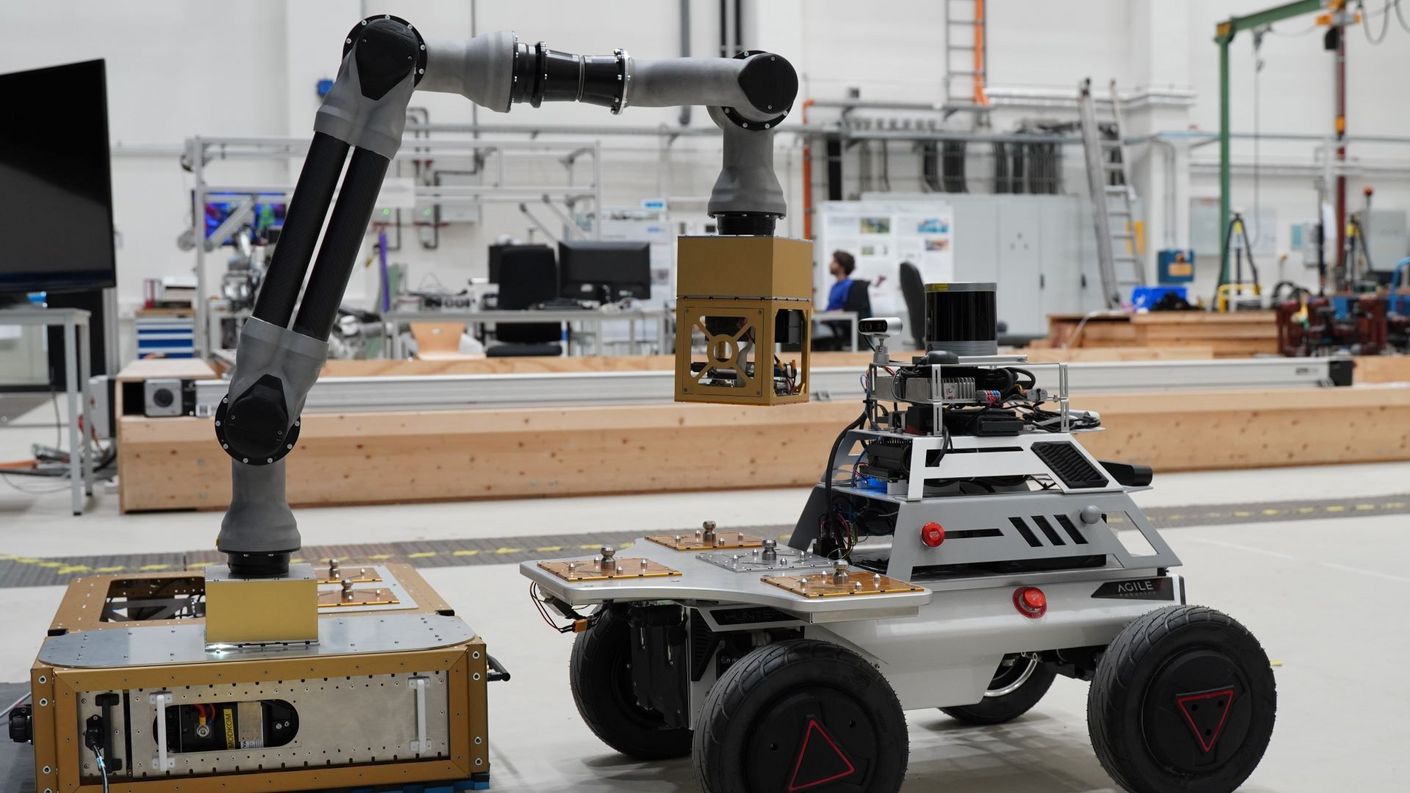
Ein besonderer Schwerpunkt liegt auf der Entwicklung vielseitiger Roboterplattformen für unterschiedliche Missionsanforderungen – von robusten Rovern über hochmobile Laufroboter bis hin zu hybriden Systemen für die planetare Exploration. Für den orbitalen Einsatz stehen die Entwicklung neuartiger Manipulatoren, robotischer Module und standardisierter Schnittstellen im Vordergrund. Die Systeme werden zunehmend modular gestaltet: Komponenten, Sensoren und Werkzeuge lassen sich flexibel austauschen oder kombinieren, sodass dieselbe Basisplattform für vielfältige Aufgaben genutzt werden kann – von der Probenentnahme über die Manipulation bis hin zum Aufbau komplexer Strukturen, auf Planeten ebenso wie im Orbit. Diese modulare Bauweise verkürzt Entwicklungszeiten, senkt Kosten und ermöglicht eine schnelle Anpassung an neue Missionsszenarien.
 © DFKI, Meltem Fischer
© DFKI, Meltem FischerKI für Autonomie, Roboterteams und Mensch-Roboter-Interaktion
Neben bewährten Steuerungs- und Navigationsverfahren kommen zunehmend KI-Methoden zum Einsatz. Lernbasierte Planungsalgorithmen und Verfahren des maschinellen Lernens – insbesondere Deep-Learning-Ansätze – erlauben es den Systemen, ihre Umgebung dynamisch zu modellieren, Hindernisse in Echtzeit zu erkennen und situationsabhängig zu reagieren. Dadurch können sie auch in unvorhersehbaren Situationen robust handeln und operative Risiken minimieren. KI-gestützte Anomalieerkennung hilft zudem, Abweichungen im Systemverhalten frühzeitig zu erkennen und Ausfälle zu verhindern.
Ein weiteres Forschungsfeld ist die Zusammenarbeit heterogener Roboterteams. Mithilfe von Sensordatenfusion und KI-basierter Koordination werden Positions- und Umgebungsinformationen ausgetauscht, Handlungen synchronisiert und Aufgaben gemeinsam umgesetzt – selbst in dynamischen, unstrukturierten Umgebungen. Eine besondere Rolle spielt hierbei das Konzept der „Sliding Autonomy“, das maschinelle Eigenständigkeit mit menschlicher Steuerung verbindet. Roboter übernehmen komplexe Aufgaben eigenständig, während Menschen strategische Entscheidungen treffen und bei Bedarf eingreifen. Adaptive Systeme werten Sensordaten aus Kameras, Steuerkonsolen oder sogar biologischen Signalen aus, um das Verhalten der Roboter situativ anzupassen und eine intuitive, kontextabhängige Mensch-Roboter-Interaktion zu ermöglichen.
 © DFKI, Tobias Stark
© DFKI, Tobias Stark
Ein Blick in die Zukunft: Quantenrobotik für Weltraumanwendungen
Aufbauend auf diesen Entwicklungen erforscht das Robotics Innovation Center zudem Zukunftskonzepte der Quantenrobotik. Ziel ist es, die Lern- und Entscheidungsfähigkeit von Weltraumrobotern langfristig zu verbessern. Klassische maschinelle Lernverfahren stoßen in komplexen Umgebungen schnell an ihre Grenzen, da sie große Datenmengen und lange Trainingszeiten benötigen. Quantenalgorithmen bieten hier neue Möglichkeiten, Daten wesentlich effizienter zu verarbeiten und zu analysieren. Mit dieser Arbeit leistet das Bremer Team Pionierarbeit in einem noch jungen Forschungsfeld, das die Leistungsfähigkeit explorativer robotischer Systeme im Langzeitbetrieb erheblich steigern könnte.
Links
Kontakt
Einzigartige Forschungs- und Testinfrastruktur für Weltraumroboter
 © DFKI, Annemarie Popp
© DFKI, Annemarie PoppDas Robotics Innovation Center in Bremen verfügt über eine hochspezialisierte Forschungs- und Testinfrastruktur.
Testanlagen:
- Kraterlandschaft: Simulation von Mond- und Marsbedingungen mit bis zu 45° Steigung.
- Maritime Explorationshalle: Unterwasser- und Schwerelosigkeitsexperimente mit Motion-Tracking.
- Virtual-Reality-Lab: Immersive Testumgebung für Simulation, Missionskontrolle und Teleoperation.
- ISO-konformer Reinraum: Integration und Qualitätskontrolle von Hardware und Elektronik.
Weitere Artikel zum Thema Raumfahrt
DFKI4Space




Einzigartige Forschungs- und Testinfrastruktur für Weltraumroboter
© DFKI, Annemarie PoppDas Robotics Innovation Center in Bremen verfügt über eine hochspezialisierte Forschungs- und Testinfrastruktur, die die praxisnahe Entwicklung und Erprobung von Robotersystemen unter realitätsnahen Bedingungen ermöglicht. Systeme, Module und Steuerungen werden iterativ getestet, um ihre Technologiereife systematisch zu steigern und schrittweise an die Anforderungen planetarer und orbitaler Missionen anzupassen.
Testanlagen:
- Kraterlandschaft: Simulation von Mond- und Marsbedingungen mit bis zu 45° Steigung.
- Maritime Explorationshalle: Unterwasser- und Schwerelosigkeitsexperimente mit Motion-Tracking.
- Virtual-Reality-Lab: Immersive Testumgebung für Simulation, Missionskontrolle und Teleoperation.
- ISO-konformer Reinraum: Integration und Qualitätskontrolle von Hardware und Elektronik.
Feldtests weltweit:
Erprobung unter weltraumanalogen Bedingungen auf der Erde, z.B. in Wüsten, Lavahöhlen oder eisbedeckten Gewässern.
ESA_Lab@DFKI – KI für die Raumfahrt
 © ESA
© ESAUm neue KI-Technologien und -Anwendungen für die zivile Raumfahrt zu entwickeln, haben die Europäische Weltraumorganisation (ESA) und das DFKI das ESA_Lab@DFKI gegründet.
Am Transferlab in Kaiserslautern arbeiten Forschende beider Einrichtungen gemeinsam an
- KI-Systemen zur Auswertung komplexer Erdbeobachtungsdaten
- Lösungen zur Kollisionsvermeidung von Satelliten
So entsteht ein enger Austausch zwischen Forschung und Raumfahrtpraxis.