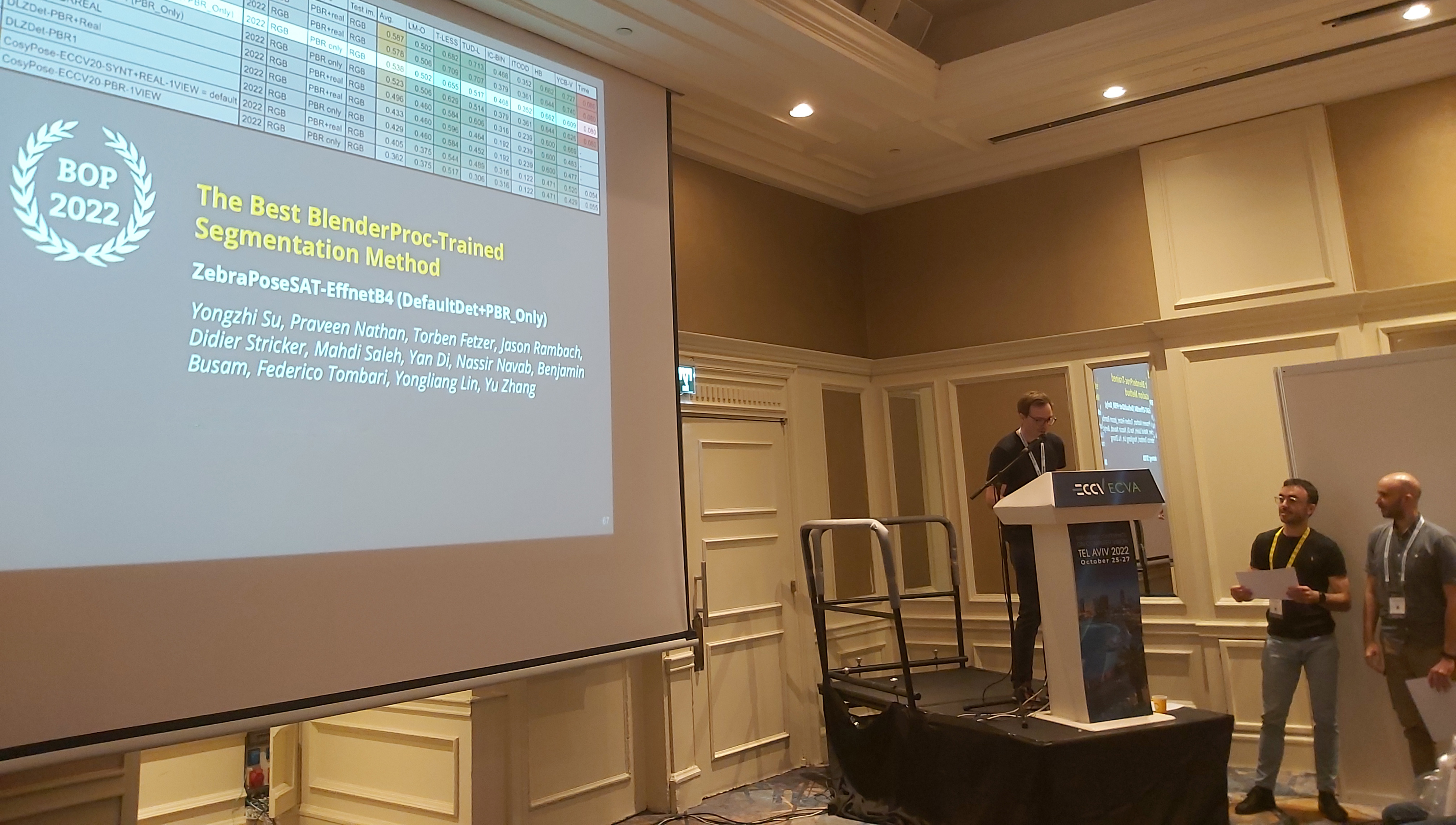
The BOP benchmark and challenge addresses the problem of 6-degree-of-freedom object pose estimation, which is of great importance for many applications such as robot grasping or augmented reality. This year, the BOP challenge was held within the “Recovering 6D Object Pose” Workshop at the European Conference on Computer Vision (ECCV) in Tel Aviv, Israel. A total award of $4000 was distributed among the winning teams of the BOP challenge, donated by Meta Reality Labs and Niantic.
The awards were received by Dr. Jason Rambach on behalf of the DFKI Team and a short presentation of the method followed. The winning method was based on the CVPR 2022 paper “ZebraPose”.
ZebraPose: Coarse to Fine Surface Encoding for 6DoF Object Pose Estimation Yongzhi Su, Mahdi Saleh, Torben Fetzer, Jason Raphael Rambach, Nassir Navab, Benjamin Busam, Didier Stricker, Federico Tombari
The winning approach was develop by a team led by DFKI AV, with contributing researchers from TU Munich and Zhejiang University.