As an interdisciplinary field of research, robotics is one of the most groundbreaking scientific fields of our time and has made great progress in recent years in terms of both hardware and software. Thanks to complex sensor and actuator technology, lightweight construction, and highly developed learning and planning algorithms, it is already possible to implement systems that can independently solve complex tasks while interacting safely with humans and their environment. However, many unsolved questions and problems still stand in the way of broad practical use in numerous application fields. Aiming to advance robotics research through new scientific findings, researchers at the DFKI Robotics Innovation Center continued to publish the results of their work in some of the most relevant and most cited journals in their discipline as well as at the most important robotics conferences in 2021.
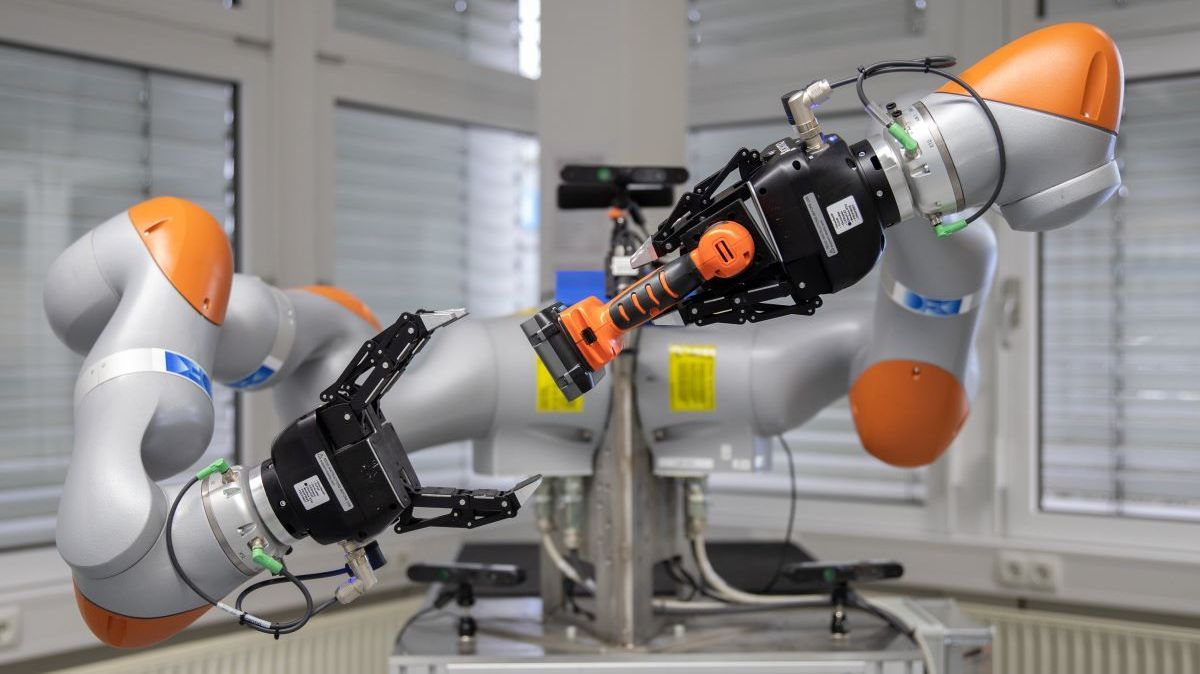
Learning context-adaptive task constraints for robotic manipulation – Dennis Mronga, Frank Kirchner
Constraints play an important role in robotics: They serve to limit the movement possibilities of a robot in such a way that the correct and safe execution of a desired movement is guaranteed. Constraint-based control approaches offer a flexible way to specify robotic manipulation tasks and execute them on robots with many degrees of freedom. However, the specification of task constraints usually requires a human-expert and often leads to tailor-made solutions for specific situations. In their paper, the researchers present an innovative approach: using machine learning techniques, task constraints can be automatically derived from training data and adapted with respect to previously unseen situations. The approach was evaluated with three different dual-arm manipulation tasks on an industrial robot and showed that it performs better than comparable approaches with respect to reproduction accuracy in unpredicted contexts.
The article is published in: Robotics and Autonomous Systems, Elsevier, volume 141, pages 103779-103779, 2021. [PDF]
Active Exploitation of Redundancies in Reconfigurable Multi-Robot Systems – Thomas Röhr
Reconfigurable multi-robot systems, which consist of several cooperating robots, can share and shift physical resources in an on-demand fashion. Multi-robot operations can benefit from this flexibility by actively managing system redundancies depending on current tasks and having more options to respond to failure events. To support this active exploitation of redundancies in robotic systems, the researcher presents an organization model as a basis for planning with reconfigurable multi-robot systems. The model allows to exploit redundancies when optimizing a multi-robot system's probability of survival with respect to a desired mission. The resulting planning approach trades safety against efficiency in robotic operations and thereby offers a new perspective and tool to design and improve multi-robot missions.
The full article is published in: IEEE Transactions on Robotics, IEEE, volume n.n., pages 1-17, Jun/2021. [PDF]
Nth Order Analytical Time Derivatives of Inverse Dynamics in Recursive and Closed Forms – Shivesh Kumar, Andreas Müller (Johannes-Kepler-Universität)
Derivations of equations of motion describing the dynamic behavior of mechanical systems are becoming increasingly relevant in robotics and are often used in the design and control of robotic systems. Thus, the control of robots and especially of multibody systems with elastic components requires not only smooth trajectories, but also the time derivatives of the control forces/torques. In their paper the researchers present novel nth order time derivatives of the equations of motion in both closed and recursive forms. While the former provides a direct insight into the structure of these derivatives, the latter leads to their highly efficient implementation for large degree of freedom robotic system.
The full article is published in: 2021 IEEE International Conference on Robotics and Automation (ICRA), (ICRA-2021), 30.5.-05.6.2021, Xi'an, IEEE, Jun/2021. IEEE. [PDF]
Design, Analysis and Control of the Series-Parallel Hybrid RH5 Humanoid Robot – Julian Eßer, Shivesh Kumar, Heiner Peters, Vinzenz Bargsten, José de Gea Fernández, Carlos Mastalli (Alan Turing Institute at the University of Edinburgh), Olivier Stasse (GEPETTO group at LAAS-CNRS), Frank Kirchner
Building a humanoid robot is one of the most challenging disciplines in robotics. In their paper, the researchers present the RH5 humanoid robot developed at the Robotics Innovation Center to the international scientific community. Unlike many existing bipedal robot designs, which are based on tree-like kinematic chains and therefore tend to be rather bulky, RH5 features a hybrid serial-parallel design. With a height of 2 meters, the robot weighs only 62.5 kilograms and can perform heavy dynamic tasks with 5 kilograms of payload in each hand. The humanoid is analyzed and controlled using whole-body trajectory optimization based on differential dynamic programming (DDP). In their paper, the researchers present an improved DDP algorithm capable of generating physically consistent walking trajectories for RH5.
The full article is published in: 2020 IEEE-RAS 20th International Conference on Humanoid Robots (Humanoids), (Humanoids-2020), 19.7.-21.7.2021, Munich/Virtual, IEEE, pages 400-407, Jul/2021. [PDF]
Learning initial trajectory using sequence-to-sequence approach to warm start an optimization-based motion planner – Sankaranarayanan Natarajan
Motion planning is a central topic in robotics. Taking the robot model into account, the task is to find a collision-free path for a robot from a given start configuration to a target configuration. Optimization-based motion planners provide smooth and locally optimal trajectory even for complex planning problems. In this context, the choice of the initial trajectory is crucial. In his paper, the researcher presents a neural network-based method to predict an initial trajectory for an optimization-based motion planner. It exploits the power of the sequence-to-sequence learning method, which has been used primarily in the field of language processing. The proposed model learns the mapping between tasks and optimal trajectories from a database and is evaluated in the planning of a 6-degree-of-freedom manipulator in two different environments. The results show that using the predicted initial trajectory significantly improves the optimization-based motion planning even in an unknown environment.
The full article is published in: 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems, (IROS-2021), 27.9.-01.10.2021, Prague/Virtual, o.A., Sep/2021. [Link]