Während robotischer Missionen auf dem Mars kommt es immer wieder vor, dass Rover bei ihrer Erkundung im Sand stecken bleiben. Das Projekt FASTER soll solche Zwischenfälle bei zukünftigen Missionen – etwa bei der Mars Sample Return Mission der ESA (Start frühestens 2018) – vermeiden. Das Besondere an dem Forschungsprojekt ist der Einsatz zweier Rover, die zusammenarbeiten, um sich dadurch sicherer und schneller auf unbekanntem Marsgelände bewegen und auch Hindernisse überwinden zu können.
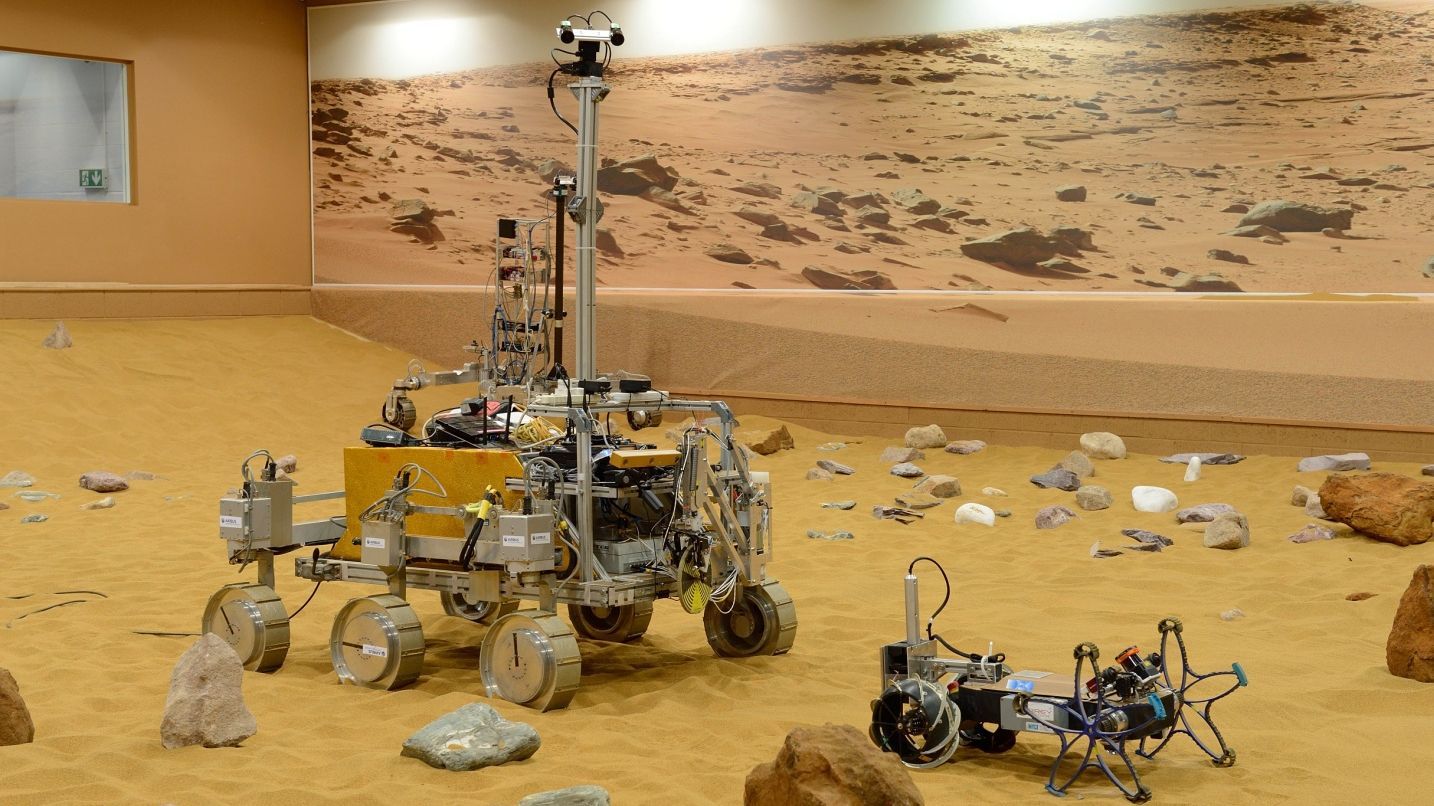
Das internationale Projektteam aus sechs europäischen Partnern – Deutsches Forschungszentrum für Künstliche Intelligenz - DFKI (Bremen, Deutschland), University of Surrey (Guildford, Großbritannien), Airbus Defence and Space (Stevenage, Großbritannien), Space Applications Services (Brüssel, Belgien), LIQUIFER Systems Group (Wien, Österreich), Astri Polska sp. z o.o. (Warschau, Polen) – entwickelte im Rahmen von FASTER neue Technologien und Systeme, welche die jeweils gegenwärtigen Bodeneigenschaften, etwa die Härte des Bodens, in Echtzeit einschätzen können. Die FASTER-Systemkomponenten verteilen sich dabei auf einen Hauptrover und einen „Scout“, einem kleinen geländegängigen Rover, der den Hauptrover unterstützt und einen Teil der Systemkomponenten trägt.
Das Robotics Innovation Center entwickelte im Rahmen des Projekts die Roboterplattform Coyote II, welche speziell für den Einsatz als Scout-Rover ausgelegt wurde. Um unsichere Abschätzungen bezüglich der Befahrbarkeit der zu erkundenden Gebiete zu vermeiden, sammelt der vorausfahrende Scout belastbare Befahrbarkeitsdaten für den nachfolgenden Hauptrover ein. Für diese Aufgabe wurde Coyote II mit zusätzlicher Bodensensorik ausgerüstet, die am Surrey Space Center der University of Surrey entwickelt wurde.
Das fertige System wurde der ESA, NASA und Experten der Europäischen Kommission während einer ganztägigen Demonstration, am 23. Oktober 2014 bei AIRBUS DS in Stevenage, UK, präsentiert. FASTER wurde über eine Laufzeit von 37 Monaten im 7. EU-Rahmenprogramm für Forschung und technologische Entwicklung gefördert.
Kontakt:
Projektkoordinator
Dr. Thomas Vögele
DFKI Bremen
thomas.voegele@dfki.de
Technischer Leiter
Dr. Chakravarthini Saaj
University of Surrey, UK
c.saaj@surrey.ac.uk
Öffentlichkeitsarbeit
Monika Banaszek-Cymerman
Astri Polska sp. z o.o., Warsaw, Poland
monika.banaszek@astripolska.pl